ラズパイで防犯ロボットを作ってみました。
ラズパイに人感(焦電型赤外線)センサーとカメラをつけて、人が通ったら撮影するものです。
使うもの
- ラズパイ3 ModelB+
- 赤色LED
- ラズパイ専用カメラ
- 人感センサー
[toc]
回路図
焦電型赤外線センサーの回路図は前回の作ったものと同じです。
LEDは人感センサーが人を検知した時に光るようにしています。
ラズパイ専用カメラも使っています。
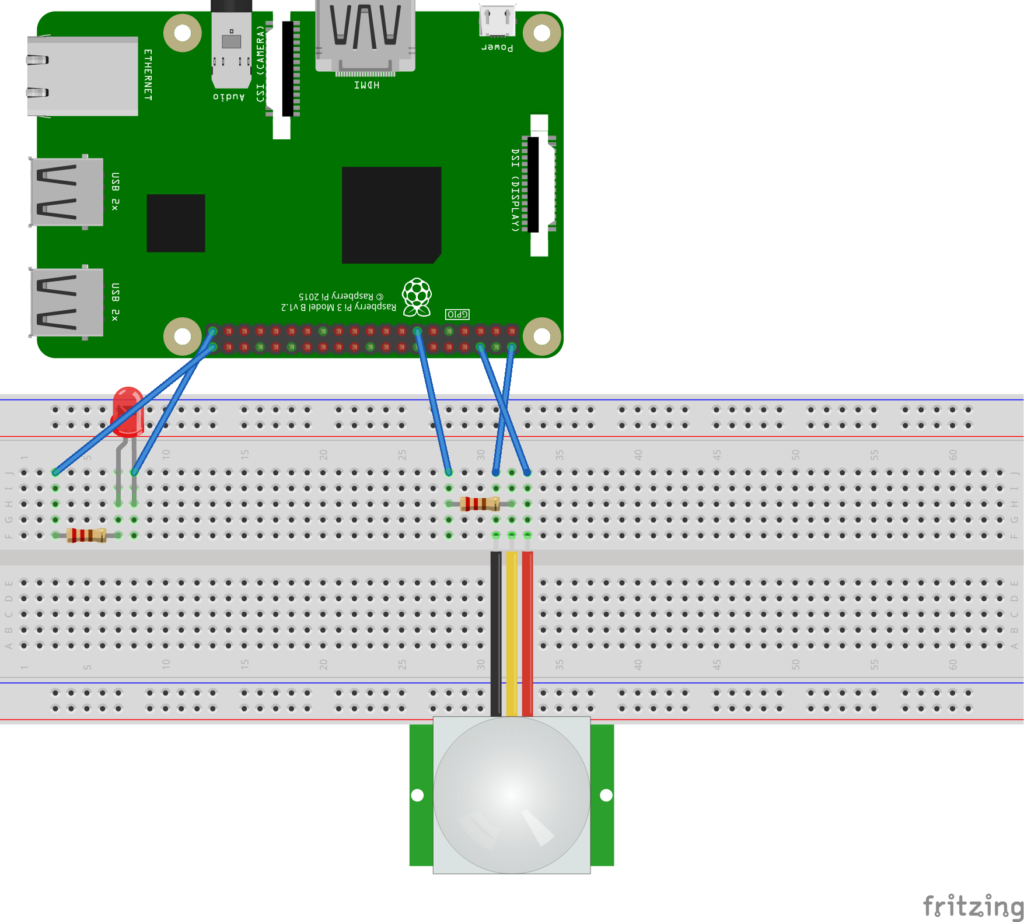
こんな感じです。

作ってみて思いましたが、ラズパイ専用カメラはケーブルがキシメンのような白いケーブルなので設置しづらいです。USBカメラの方が良いかもしれません。
人感センサーもうまく固定したかったのですが、本の上に置いただけですw
コード
人感センサーが反応したら、現在時刻を取得して写真をとります。
写真を撮るにはpicameraを使います。ラズパイに入っていたpython3にデフォルトのパッケージで入っていました。
import RPi.GPIO as GPIO
from time import sleep
import picamera
from datetime import datetime
camera = picamera.PiCamera()
camera.resolution = (600, 800)
camera.hflip = True
camera.vflip = True
SENSOR_PORT = 27
LED_PORT = 21
GPIO.setmode(GPIO.BCM)
GPIO.setup(SENSOR_PORT, GPIO.IN)
GPIO.setup(LED_PORT, GPIO.OUT)
try:
while True:
v = GPIO.input(SENSOR_PORT)
print(v)
if v == GPIO.HIGH:
GPIO.output(LED_PORT, GPIO.HIGH)
now = datetime.now().strftime("%Y_%m_%d_%H_%M_%S")
print(now)
camera.capture(now+'.jpg')
sleep(1)
else:
GPIO.output(LED_PORT, GPIO.LOW)
sleep(0.1)
except KeyboardInterrupt:
pass
GPIO.cleanup()
実行すると、人が近くたびに、写真を取ってくれます。
ただ人が写っていない写真が結構撮れました。
理由としては以下の2つ。
- 人感センサーの視野角がカメラに比べて広い
- 人感センサーは人が去った後も数秒間はOFFにならない
人感センサーは安全側に倒して作られているようです。用心深い人にとっては嬉しい仕様ですね。
何回か試しましたが、検知漏れはありませんでした。確実に検知してくれます。
自分の部屋につけて監視するのも面白いかもしれません。
おわり。